Empirical Orthogonal Functions analysis
Empirical Orthogonal Functions analysis decomposes the continuous space-time field into a set of orthogonal spatial patterns along with a set of associated uncorrelated time series or principal components (Fukuoka 1951; Lorenz 1956). It is a form of PCA but not restricted to multivariate statistics. Similar to PCA, it can also be used to reduce the large number of variables of the original data to a fewer variables (dimensionality reduction), without much compromising the variability in the data. This approach is essential for big data analysis or in machine learning applications. EOFs are multipurpose and have been used widely for pattern or feature extraction from the data (Fukunaga & Koontz 1970).
The continuous space-time field, $latex X(t,\vec{s})$ can be expressed as

where $latex M$ is the number of modes, $latex u_k(\vec{s})$ is the basis function of space and $latex c_k(t)$ is the expansion function of time. The aim of EOF analysis is to find a set of new variables that captures most of the observed variance in the data through linear combinations of the original variables.
Formulation and computation of EOFs
To apply EOF analysis, I first construct the data matrix $latex F$, which contains all the detrended and demeaned values for each three components (north, east, or vertical) where columns correspond to each selected station (say, $latex n$ stations) and each row is the daily time data snapshot (say, spanning $latex p$ days).

where the value of the field at discrete time $latex t_i$ and spatial grid point $latex s_j$ is denoted by $latex f_{ij}$. For $latex i = 1, \dots , p$ and $latex j = 1, \dots , n$. I obtain the sample covariance matrix, $latex B$ as

Since the EOF aims to find the uncorrelated linear combinations of different variables that explain maximum variance. This translates mathematically to find a unit length direction $latex \vec{u}$ such that $latex F\vec{u}$ has maximum variability. This can be expressed as

The above equation can be achieved by considering an eigenvalue problem $latex b_{ij}\vec{u} = \lambda^{2}\vec{u}$. Here, I decompose the data matrix $latex F$ directly, using the Singular Value Decomposition approach (Golub & Van Loan 1996), as

where $latex A$ and $latex U$ are respectively $latex p \times r$ and $latex r \times n$ unitary matrix ( $latex U^TU = A^TA = I_r$) and $latex r \leq min(n, p)$ is the rank of $latex F$. The diagonal matrix $latex \Lambda = Diag(\lambda_1,\lambda_2,\dots,\lambda_r)$. The columns of $latex A$ ($latex a_1, a_2,\dots,a_r$), and $latex U$ ($latex u_1, u_2,\dots,u_r$) respectively are the EOFs and principal components (PCs) of the data matrix $latex F$. To improve the computation of the above equation, it is advisable to take the $latex min(p,n)$ as the first dimension of $latex F$. The EOFs, $latex A$ are orthogonal and the PCs, $latex U$ are uncorrelated. Hence, the Equation above yields the decomposition

Accounted variance
The principal components and the corresponding eigenvectors respectively represent the temporal and spatial part of the given input data matrix $latex F$. I arrange the eigenvectors in decreasing order of eigenvalues, such that the first PC represents the biggest contributor to the variance of the space-time field. It is conventional to write the accounted variance in percentage as

The spectrum of the covariance matrix $latex B$ provides information on the distribution of power (or energy) as a function of scale, and on the separation (or degeneracy) of the EOF patterns (represented as modes). The high and low power respectively are most commonly associated with the low and high-frequency variability. Hence, low frequency (and large scale) patterns tend to capture most of the observed variance in the system.
If two eigenvalues are degenerate (or indistinguishable within estimated uncertainties), then their corresponding EOF pattern can possibly mix and may not be particularly interesting.
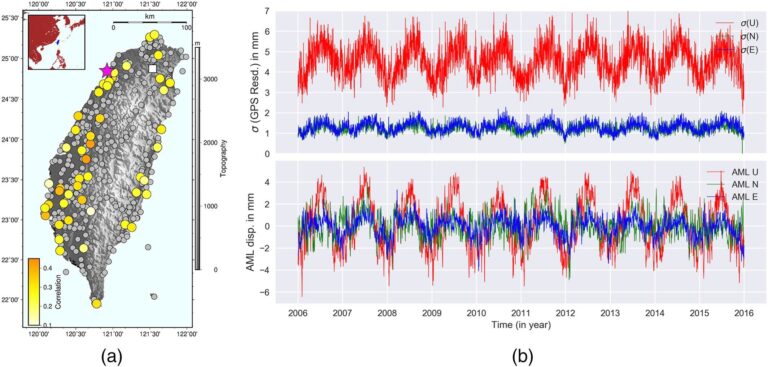
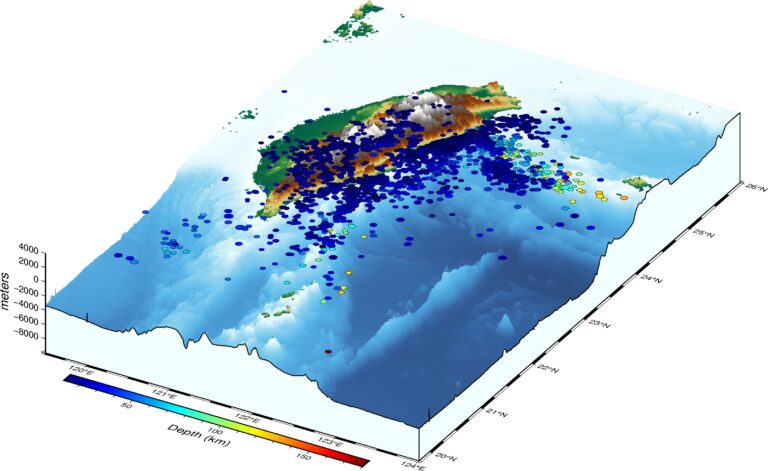
Application on the GPS data of Taiwan (Kumar et al., 2020)
I constructed the space-time data matrix of the GPS residuals for the daily time samples for 10 years, and 47 selected stations. EOF retrieves the coherent spatio-temporal signals mathematically by solving for a series of eigenmodes of the covariance matrix expressed in standing oscillations in the form of the product of spatial pattern and time series for a given target region and selected timespan (Chao & Liau 2019; Chang & Chao 2014). I arranged the eigenmodes in decreasing order of (the positive) eigenvalues, such that the first eigenmode represents the biggest contributor to the variance (measured by the ratio of the eigenvalue for the given mode index to the sum of all eigenvalues) of the GPS residuals.
Here the first mode is for the CME, while the higher modes reflect secondary effects or local and short-period signals or noises not of interest here. The calculated eigenvalue spectrum of the EOF along with their standard errors (calculated using Monte Carlo simulations) shows that the first mode is nondegenerate and separated from the rest.
I normalize the spatial pattern for the first mode by dividing with the RMS value (given that it is near-uniform in space), whereas for the second mode by dividing with the standard deviation (given its fluctuation around 0). The corresponding time series, or principal components, are scaled by multiplying by the same normalization value, transferring the magnitude information of eigenvectors into the principal components, which hence has the same unit as the data (mm in our study).

MATLAB Function for EOF analysis
Consider citing Kumar et al., 2020, if you use the codes.
function [eigenValues, varpercent, eofMapPattern, eof_temp_coeff] = eof_n_optimizado_A(data)
Z=detrend(Matrix,'constant'); %removes the mean value from each column of the matrix
% the matrix dimensions:
% n = number of temporal samples
% p = number of points with data
[n,p] = size(Z);
% If n>=p we estimate the EOF in the State Space Setting, i.e., using Z'*Z which is p x p.
% If n<p we estimate the EOF in the Sample Space Setting, i.e., using Z*Z' which is n x n
if n>=p
%%%%%%%%%%%%%%%%%%%%%%%%%%%
%%% State Space Setting %%%
%%%%%%%%%%%%%%%%%%%%%%%%%%%
% Covariance matrix
R=Z'*Z;
% We estimate the eigenvalues and eigenvectors of the covariance matrix.
[eof_p,L]=eigs(R, eye(size(R)),10); % The eigenvelues are in the diagonal of L
% and the associated eigenvectors are in the columns of eof_p
eigenValues=diag(L);
% We estimate the expansion coefficients (time series) associated to each EOF
[a,b]=size(L);
for i=1:a
exp_coef(:,i)= Z * eof_p(:,i);
end
elseif n<p
%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%%% Sample Space Setting %%%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%
fprintf('Sample space setting\n');
% Scatter matrix
R=Z*Z';
% We estimate the eigenvalues and eigenvectors of the scatter matrix.
[eof_p_f,L]=eigs(R, eye(size(R)),10); % The eigenvelues are in the diagonal of M
% and the associated eigenvectors are in the columns of eof_p_f
eigenValues=diag(L);
% We estimate the expansion coefficients (time series) associated to each EOF
[a,b]=size(L);
for i=1:a
exp_coef_b(:,i)= Z' * eof_p_f(:,i);
end
% We transform the EOF and their associated expansion coefficient (time series) in the Sample
% space setting to those in the State space setting
%Expansion coefficients
for i=1:a
eof_p(:,i)= exp_coef_b(:,i) / sqrt(eigenValues(i));
end
%Expansion coefficients
for i=1:a
exp_coef(:,i)= sqrt(eigenValues(i)) * eof_p_f(:,i);
end
end
% We estimate the percentage of variance explained by each EOF/eigenvector
varpercent = ( diag(L)/trace(L) )*100;
%We normalized the EOF
[a_1,b_1]=size(eof_p);
[a_11,b_11]=size(exp_coef);
eofMapPattern=eof_p;
eof_temp_coeff=exp_coef;
for i=1:b_1
eofMapPattern(:,i) = eof_p(:,i)./ rms(eof_p(:,i));
eof_temp_coeff(:,i) = exp_coef(:,i).* rms(eof_p(:,i));
% using standard deviation
% eofMapPattern(:,i) = eof_p(:,i)./ std(exp_coef(:,i));
% eof_temp_coeff(:,i) = exp_coef(:,i) .* std(exp_coef(:,i));
end
References
[zotpress items=”{9687752:ZD3THVWQ},{9687752:KKUUW52U},{9687752:2SVFZE4B},{9687752:LTPRTWWF},{9687752:8TRHGN9A},{9687752:ZXR6U8Q5},{9687752:BY5JTNED}” style=”apa”]